22. 仿真
古之学者必有师。师者,所以传道受业解惑也。
22.1. 为什么需要仿真
想象一下当你发现了一个新的算法,但还不确认它是否有效,你是否会直接找一辆自动驾驶汽车,更新软件,并且进行测试呢?这样做可能并不安全,你必须把所有的场景测试一遍以保证它足够好,这可需要大量的时间。仿真的好处显而易见,它通过软件模拟来发现和复现问题,而不需要真实的环境和硬件,可以极大的节省成本和时间。
随着现在深度学习的兴起,仿真在自动驾驶领域有了新的用武之地。自动驾驶平台通过仿真采集数据,可以把训练时间大大提高,远远超出路测的时间,加快模型迭代速度。先利用集群训练模型,然后再到实际的路测中去检验,采用数据驱动的方式来进行自动驾驶研究。
自动驾驶的仿真的论文可以参考英伟达的End to End Learning for Self-Driving Cars,主要的目的是通过软件来模拟车以及车所在的环境,实现自动驾驶的集成测试,训练模型,模拟事发现场等功能。那么我们是如何模拟车所在的环境的呢?
22.2. 如何仿真
要模拟车所在的环境,就得把真实世界投影到虚拟世界,并且需要构造真实世界的物理规律。例如需要模拟真实世界的房子,车,树木,道路,红绿灯,不仅需要大小一致,还需要能够模拟真实世界的物理规律,比如树和云层会遮挡住阳光,房子或者障碍物会阻挡你的前进,车启动和停止的时候会有加减速曲线。 总之,这个虚拟世界得满足真实世界的物理规律才足够真实,模拟才足够好。而这些场景恰恰和游戏很像,游戏就是模拟真实世界,并且展示出来,游戏做的越好,模拟的也就越真实。实现这一切的就是游戏引擎,通过游戏引擎模拟自然界的各种物理规律,可以让游戏世界和真实世界差不多。这也是越来越多的人沉迷游戏的原因,因为有的时候根本分不清是真实世界还是游戏世界。 现在我们找到了一条捷径,用游戏来模拟自动驾驶,这看起来是一条可行的路,我们把自动驾驶中的场景复制到游戏世界,然后模拟自动驾驶中各种传感器采集游戏世界中的数据,看起来我们就像是在真实世界中开着自动驾驶汽车在测试了。
22.2.1. 仿真软件
我们已经知道可以用游戏来模拟自动驾驶,而现在大家也都是这么做的,目前主流的仿真软件都是根据游戏引擎来开发,下面是主要的几个仿真软件:
仿真软件 |
引擎 |
介绍 |
|---|---|---|
Unity |
优达学城的自动驾驶仿真平台 |
|
Unreal4 |
Intel和丰田合作的自动驾驶仿真平台 |
|
Unreal4 |
微软的仿真平台,还可以用于无人机 |
|
Unity |
LG的自动驾驶仿真平台 |
|
Dreamview百度的自动驾驶仿真平台 |
Unreal4 - 主要的编程方式是c++,源码完全开源,还可以通过蓝图来编程。比较著名的游戏有:《鬼泣5》《绝地求生:刺激战场》
Unity - 主要的编程方式是c#和脚本,源码不开放,超过盈利上限收费。比较著名的游戏有:《王者荣耀》《炉石传说》
22.2.2. 工作方式
那么仿真软件是如何工作的呢?大部分的仿真软件分为2部分:server端和client端。
server端主要就是游戏引擎,提供模拟真实世界的传感器数据,并且提供控制车辆,红绿灯以及行人的接口,还提供一些辅助接口,例如改变天气状况,检测车辆是否有碰撞等。
client端则根据server端返回的传感器数据进行具体的控制,调整参数等。
可以认为server就是游戏机,而client则是游戏手柄,根据游戏中的情况,选择适当的控制方式,直到游戏通关。
22.2.3. 工作原理
我们知道游戏引擎模拟了传感器的数据,那么游戏引擎是如何实现模拟真实世界中的传感器数据的呢?
摄像头深度信息
摄像头场景分割
摄像头长短焦
Lidar点云
radar毫米波
Gps信息
除了传感器数据,还需要模拟真实世界的物理规律:
碰撞检测
光线和天气变化
汽车动力学模型
TODO: 补充原理
下面分析下carla中如何实现上述的模拟,其实也可以看做Unreal4中如何实现上述功能,carla传感器的实现在”carla/Unreal/CarlaUE4/Plugins/Carla/Source/Carla/Sensor”中。
其中摄像头深度信息是通过投影”carla/Unreal/CarlaUE4/Plugins/Carla/Content/PostProcessingMaterials”中的材质实现的,这里有点疑惑就是难道深度信息是实现就生成的,还是说材质类似做一层滤镜的操作?
而Lidar是通过Raycast来实现的,即发送射线检测距离。主要的疑问是如何模拟点云的角度,参数等信息?
天气的变化直接是通过”蓝图”实现的,没有找到具体的地方?
汽车动力学模型暂时也没有找到地方?
22.3. 如何使用
22.3.1. 桥接器
如果是单独实现或者测试一个算法,直接拿写好的算法在仿真软件上进行测试就可以了,但是如果是需要测试已经开发好的软件,比如apollo和autoware系统,则需要实现仿真软件和自动驾驶系统的对接。一个简单的想法就是增加一个桥接器,就像手机充电器的转换头一样,通过桥接器来连接仿真软件和自动驾驶系统。目前carla和lgsvl都实现了通过桥接器和自动驾驶系统的对接,可以直接通过仿真软件来测试自动驾驶系统。
目前carla和lgsvl都是单独把apollo和autoware拉了一个分支,然后在其中集成一个适配器(ROS桥接),来实现仿真软件和自动驾驶系统的对接。当然apollo3.5切换到cyber框架之后,可以通过cyber桥接来实现。
22.3.2. 制作地图
仿真中另外一个问题经常遇到的问题就是制作地图,以上的仿真软件都提供了地图编辑器来构建自己想要测试的地图。目前地图格式主要采用的是OpenDrive格式的地图,如果是和Apollo集成的化,需要把OpenDrive格式的地图转换为Apollo中能够使用的地图格式。现在的主要问题是地图编辑器不是那么好用,大部分好用的地图编辑软件都需要收费。
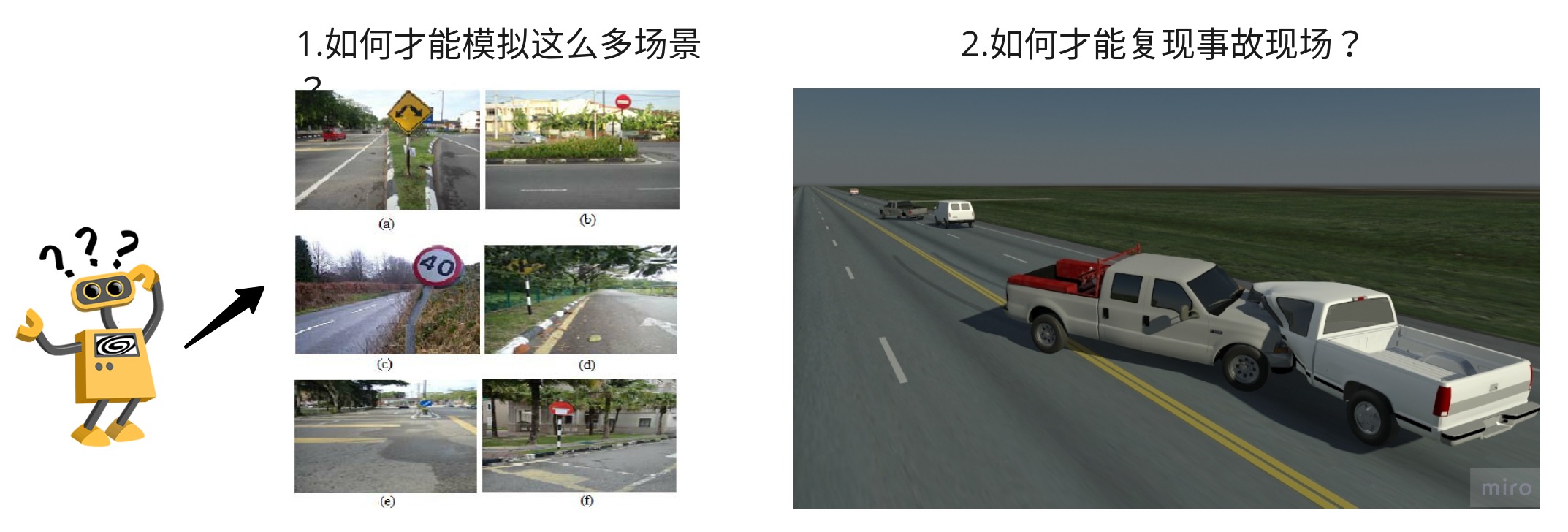
22.3.3. 测试场景
根据我们的测试需求,我们可以构建以下几种测试场景:

场景复现 - 假如自动驾驶过程中出现了一次接管(自动驾驶遇到突发状况解决不了,被人类驾驶员接管),首先我们需要复现当时的场景,这时候不可能再重新回去构建相同的场景,这时候就需要仿真去模拟当时的场景,找到问题之后,我们也可以通过仿真来看针对上述接管的情况是否解决。仿真通过模拟当时接管的场景,可以复现当时出现的问题,同时判断修改软件之后是否对当时的场景有所改善。
集成测试 - 每次开发一个新的功能和迭代之后,通过仿真构造全部场景的测试用例,例如:红绿灯,超车,停车,左拐弯,右拐弯,掉头,十字路口等情况来测试所有场景是否都没有问题,可以在软件真正上车测试之前保证软件的可靠性,检验新开发的功能,提高软件质量,减少测试成本。
训练模型 - 通过仿真软件来生成数据训练模型,真实场景的数据采集需要大量的车和时间,而软件可以通过分布式部署就可以实现模拟真实场景的大量数据,特别是针对目前感知的深度学习算法需要大量数据训练的情况,所以通过仿真可以加快模型训练和部署的速度。另外斯坦福大学还通过仿真来模拟汽车失控的情况下,尽量避免碰撞的场景,做一些新的研究和尝试。
22.3.4. 功能多样化
我们需要仿真软件能够适应不同的测试场景,就必须要求仿真软件能够提供灵活和多样化的功能,我们要提供哪些功能呢?
多机控制 - 不仅可以控制自己,还可以控制游戏中的其他角色。控制多辆车在一个地图里面跑,好处是可以多辆车竞争,有点类似遗传算法,把一些车放到里面跑,然后其中选出最好的,如此往复,得到最好的模型。同时多机控制还可以帮助我们控制游戏中的其他车辆,构建不同的测试场景,比如:行人横穿马路,超车等情况。
传感器参数调整 - 通过调整传感器参数实现不同硬件配置下的自动驾驶模拟,例如调整摄像头的参数,调整激光雷达的位置等,增加了传感器的灵活性。
汽车模型 - 根据需要导入不同的汽车模型,包括卡车,三轮车,小汽车的3D模型和动力学模型。
地图模型 - 如果纯手工制作模型太难了,是否可以根据3D点云的数据,然后根据软件来虚拟生成道路模型。
22.4. 如何构建自动驾驶仿真系统?
仿真最主要的目的是:通过模拟真实环境和构建汽车模型,找出自动驾驶过程中可能出现的问题。那么如何构建自动驾驶仿真系统呢?目前主流的实现方式是通过游戏引擎来模拟真实环境,通过CarSim等软件构建汽车的动力学模型来实现自动驾驶仿真。下面我们先看下自动驾驶仿真系统的整体结构。
 我们需要自动驾驶仿真系统满足:
我们需要自动驾驶仿真系统满足:
场景丰富
接口灵活
恢复快速
部署方便
首先我们关注仿真器本身,仿真器无非是模拟支持各种场景,其中场景分为:可以定义的场景和随机场景。可以定义的场景又分为:单元场景和真实场景。下面我们分别介绍下这几种场景:
可定义的场景 - 主要是针对驾驶过程中遇到的不同情况,比如会车,超车,红绿灯,变道等,这些场景一般都比较简单,类似于单元测试,主要是测试单个场景是否能够满足要求,这一部分业界已经有规范,可以参考openscenario。拿超车的场景举例子,可以创建一辆NPC车辆在本车的前面,在不同的速度和距离条件下,测试本车超车是否成功。
真实场景 - 复现真实场景中遇到的问题,比如真实路测过程中遇到问题,需要复现当时的情况,并且验证问题是否已经解决,可以回放真实场景的数据来进行测试。
随机场景 - 这种场景类似于路测,模拟真实环境中的地图,并且随机生成NPC,天气,交通情况等,模拟汽车在虚拟的环境中进行路测,由于可以大规模部署,可以快速的发现问题。
我们可以看到不管是哪个场景,都是”地图+车+行为”的模式,场景的需求复杂多变,因此能够灵活的加载地图,车和行为就成为仿真器易用的关键。
 我们的需求是能够根据不同的要求创建不同的场景,动态的添加地图,车和行为。场景生成器是一个框架,支持通过不同的配置,动态创建不同的场景,来满足我们的要求。除了场景生成器,我们还需要仿真器具备以下几个基本功能:
我们的需求是能够根据不同的要求创建不同的场景,动态的添加地图,车和行为。场景生成器是一个框架,支持通过不同的配置,动态创建不同的场景,来满足我们的要求。除了场景生成器,我们还需要仿真器具备以下几个基本功能:
复位 - 在故障发生之后,我们能够复位环境和车辆到初始状态,同时也要求我们能够复位对应的自动驾驶系统。这样再每次故障后,可以不用人工操作,而自动恢复测试。
快照 - 能够生成对应帧的信息,保存快照的好处是能够恢复事故现场,同时也可以用于自动驾驶数据集的建设。保存的点云和图片由于有groundtruth,可以作为机器学习的输入来训练模型。
回放 - 回放功能主要是用于故障定位,在发生碰撞之后,回放信息用于定位问题。
统计 - 统计主要是用于作为benchmark,来衡量系统的稳定性。
有了这些基础功能还不够,我们还需要关心具体的场景,下面我们分别对地图、车以及行为来详细描述需要实现的具体功能:
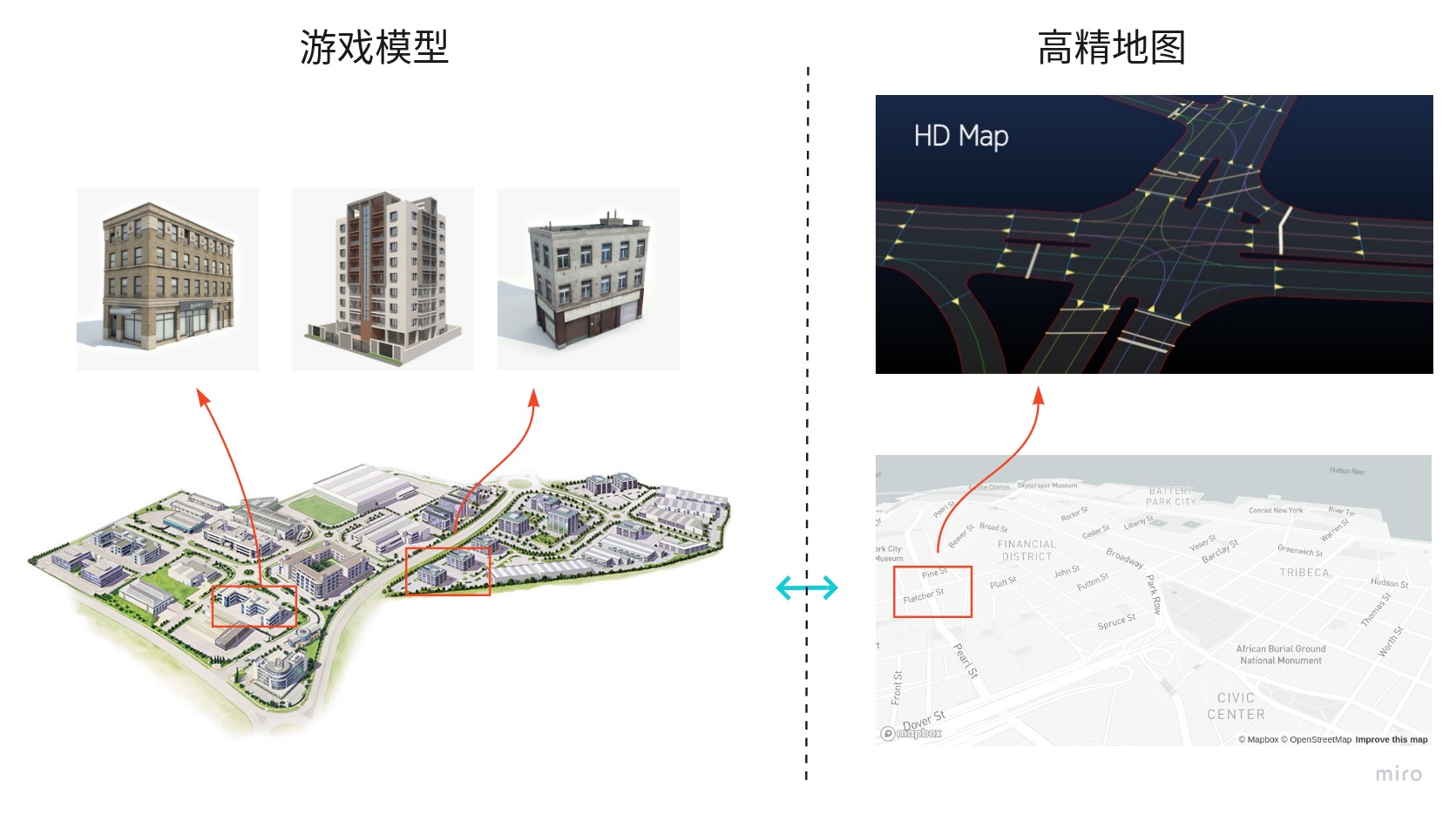
22.5. 地图
地图是场景中第一个需要考虑的,地图包括2部分,其中一部分是游戏中的模型,另外一部分是这些模型的高精度地图。换一种说法就是,首先我们需要在游戏中构建一个1:1的虚拟世界,然后再绘制出这个世界的高精度地图。其实游戏中的模型是游戏引擎的需求,游戏引擎是根据模型来渲染游戏画面的,没有模型也就渲染不出地图。而高精度地图是自动驾驶系统所需要的,高精度地图可以采用根据现场绘制的地图,也可以先得到游戏模型,然后在模型中绘制。下面是游戏中的地图和高精度地图的对应关系。
22.6. 真实场景地图生成
22.6.1. 地图模型制作
游戏中地图模型的制作相对来说是工作量比较大的工作,涉及到以下2点:
单个模型制作 - 单个模型包括地图中的建筑物、道路、树木、信号灯、交通牌、以及其他的信息。这些信息如果是要完全模拟真实环境,需要大量的材质和贴图,一般是在maya和3d-max等软件中建模,然后再导入模型到游戏引擎中使用。
地图布局 - 有了单个模型,当需要把单个模型组合成地图的时候,首先需要解决的是道路的位置信息,比如这个道路有多长,道路的曲率是多少?比较简单点的方法是直接导入2维地图(百度,高德,OSM),然后对照着2维地图放模型,最后生成整个地图的布局。而实际的问题是2维地图的精度往往达不到要求,国内的地图还加入了GPS偏置,所以生成的地图布局必定会不太准确。
22.6.2. 高精度地图制作
根据模型生成地图 - 接着上面的地图布局来讲,虽然得到的地图布局不准确,但是我们再根据游戏中的模型布局,绘制出高精度地图,然后把这个高精度地图给自动驾驶系统使用,基本上也能满足我们的要求。
根据地图生成模型 - 上述的问题就是游戏中的真实位置和实际道路的位置有轻微的误差。要解决上面的问题,我们可以反其道而行之,先生成高精度地图,即根据真实环境先绘制出高精度地图,然后再把高精度地图导入游戏引擎,动态的生成模型,这个方案的好处是地图100%是真实场景,而且不需要在游戏引擎中重新绘制高精度地图,坏处是建筑的模型无法生成。
关于真实场景的地图生成,目前还没有一个比较完美的解决方案,都需要大量的工作。下面我们再看下虚拟场景的地图生成。
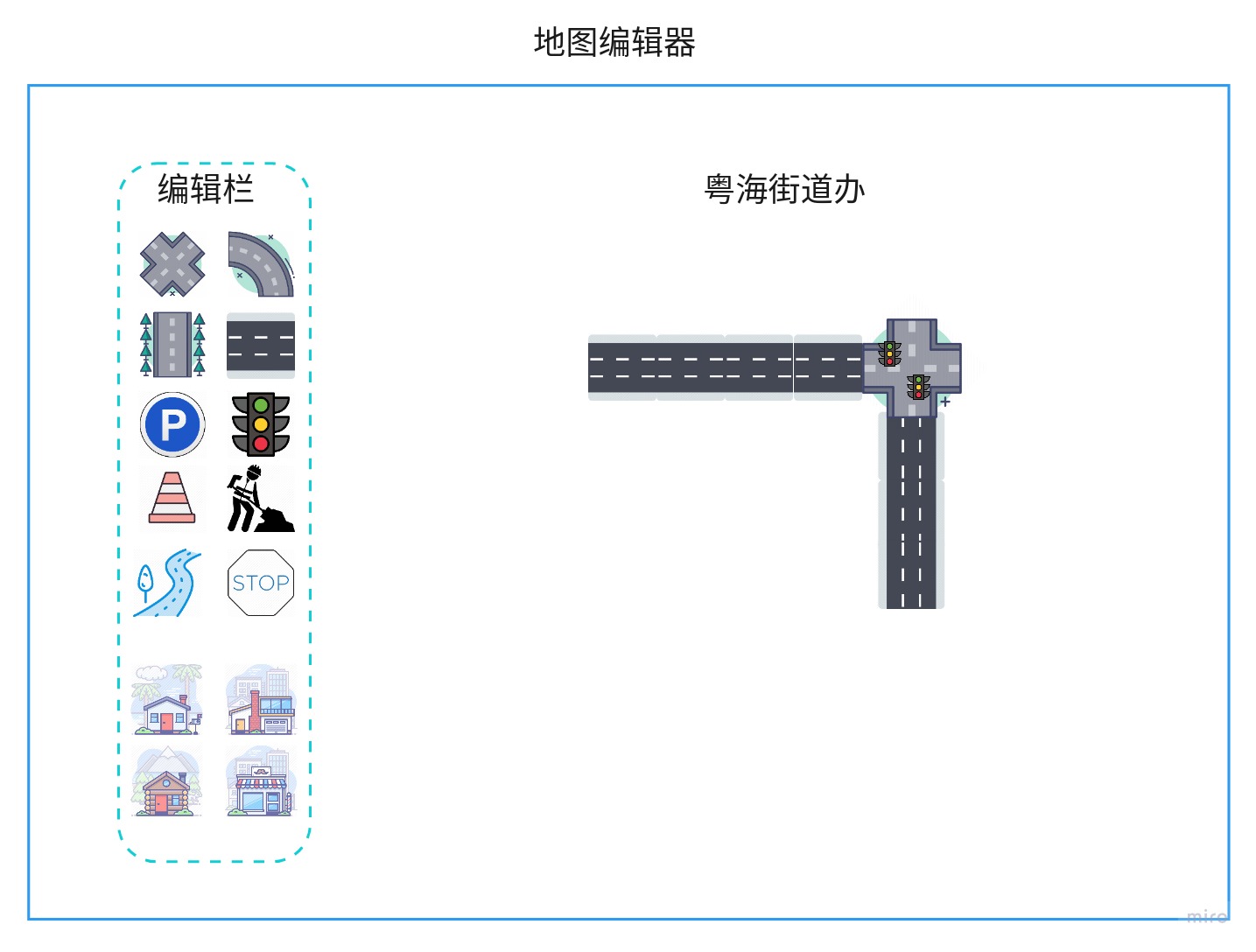
22.7. 虚拟场景地图生成
虚拟场景的道路生成就比较简单,主要的应用场景是一些园区,或者一些测试场景。这一部分完全可以制作一个地图编辑器,类似游戏中的地图编辑器,玩家可以根据自己的需求创建游戏中的地图,然后再由脚本动态的生成高精度地图。这部分的功能主要是对标Carsim等仿真软件的地图编辑功能。
说完了地图,接下来看下车
22.8. 车
车主要分为2部分:车的动力学模型,以及传感器。接下来我们详细分析下这2部分:
车的动力学模型 - 这一部分是传统仿真软件的强项,由于应用已经非常成熟,游戏中的汽车动力学模型都比较简单,由于CarSim等软件没有开源,所以目前短期内一个比较好的解决方案是,仿真器提供API接口,调用CarSim和Simulink等软件的动力学模型,实现对汽车的模拟。
传感器 - 传感器主要是GPS、IMU、LIDAR、RADAR、CAMERA等,涉及到传感器的位置,校准参数等。当然这一部分也可以仿真传感器视野范围(FOV),也可以仿真传感器的校准算法。
22.9. 行为
现在我们加载了地图,车辆,接着我们需要定义一些行为来模拟真实世界。
22.9.1. NPC
npc包括行人和车辆。
行人 - 目前主要是模拟行人过马路,以及在路边行走,以及更加复杂的场景,例如下雨天打伞的行人,对于这些异常场景,感知模块不一定能够正常识别。
车辆 - 车辆的行为可以由一些简单的行为来模拟复杂的行为,例如停车,变道,加速,减速,来组合出超车,会车等复杂行为。也可以通过模拟真实情况的交通流数据,来模拟整个行为。前一种测试的行为比较成熟,后一种需要根据实际的情况提取出行为,再加入补全信息,才能够正常工作。
22.9.2. 天气
天气主要是影响传感器的感知,最主要的就是摄像头。对LIDAR的影响由于目前没有阅读相关平台是否有加入噪声,这里就先不展开了。
天气 - 雨、雪、雾、云层 调整不同的比率来模拟不同的天气情况对传感器的影响,云层主要是会影响光照变化,多云投射的阴影对车道线识别等会有影响。
时间 - 白天和夜晚不同光照场景下对传感器的影响。
22.9.3. 红绿灯
这一部分可以归纳为交通信号的行为,其中分为:
有保护的红绿灯 - 各大城市是最普遍的,即有箭头的红绿灯,根据对应车道的红绿灯直行或者拐弯。
无保护的红绿灯 - 即圆形的红绿灯,对面可以直线的同时,你可以拐弯,需要注意对面直行的车辆,选择让车之后再拐弯。
无红绿灯 - 这种常见于郊区路口,需要判断有没有车辆经过而让行或者停止,然后再通过路口。
关于仿真器就介绍完毕了,那么我们如何控制仿真器来实现这些呢?
22.10. API
目前主要是通过python API的方式来控制仿真器加载模型,控制仿真器的行为。好处是不用图形界面手工操作,可以实现自动化部署。API的主要是根据上述所说仿真器的功能实现统一的接口,实现交互。
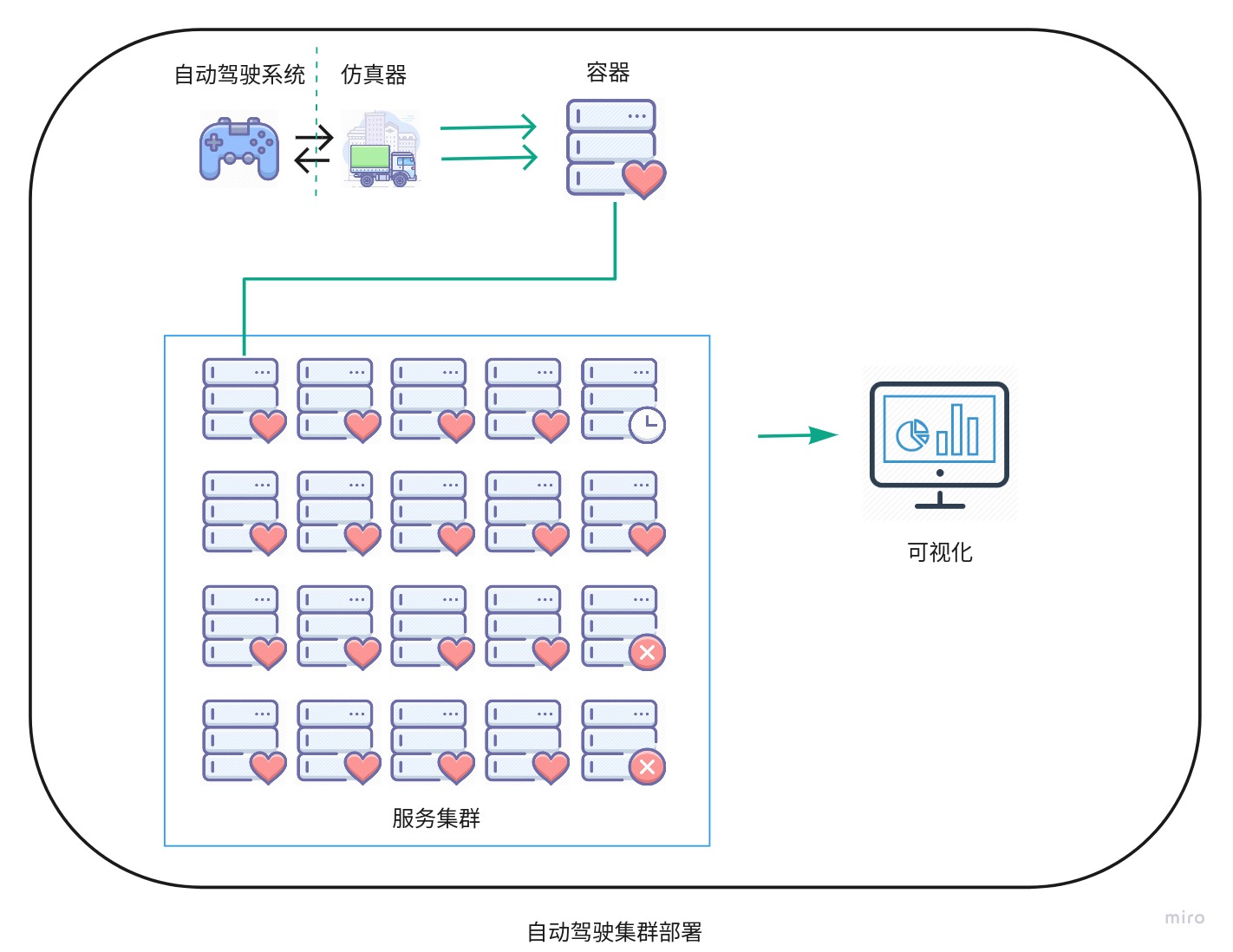
22.11. 部署
为了提高测试效率,我们还需要大规模部署,一个比较好的方式是通过容器化的方式部署。针对于多台机器,一个显而易见的需求就是创建一个管理平台来实现对仿真器的管理。容器部署平台可以监控对应仿真器的状态,并且提供可视化的配置界面,生成和部署不同的场景。
监控 - 可以监控仿真器的监控状态,显示正常和有问题的集群,保存日志,维护集群的稳定。
可视化 - 首先是配置可视化,可以方便的选择不同的配置(不同的地图,车,行为)来生成不同的场景,其次是通过可视化反馈仿真结果,屏蔽仿真集群的细节,使用起来更加直观方便。
22.12. 总结
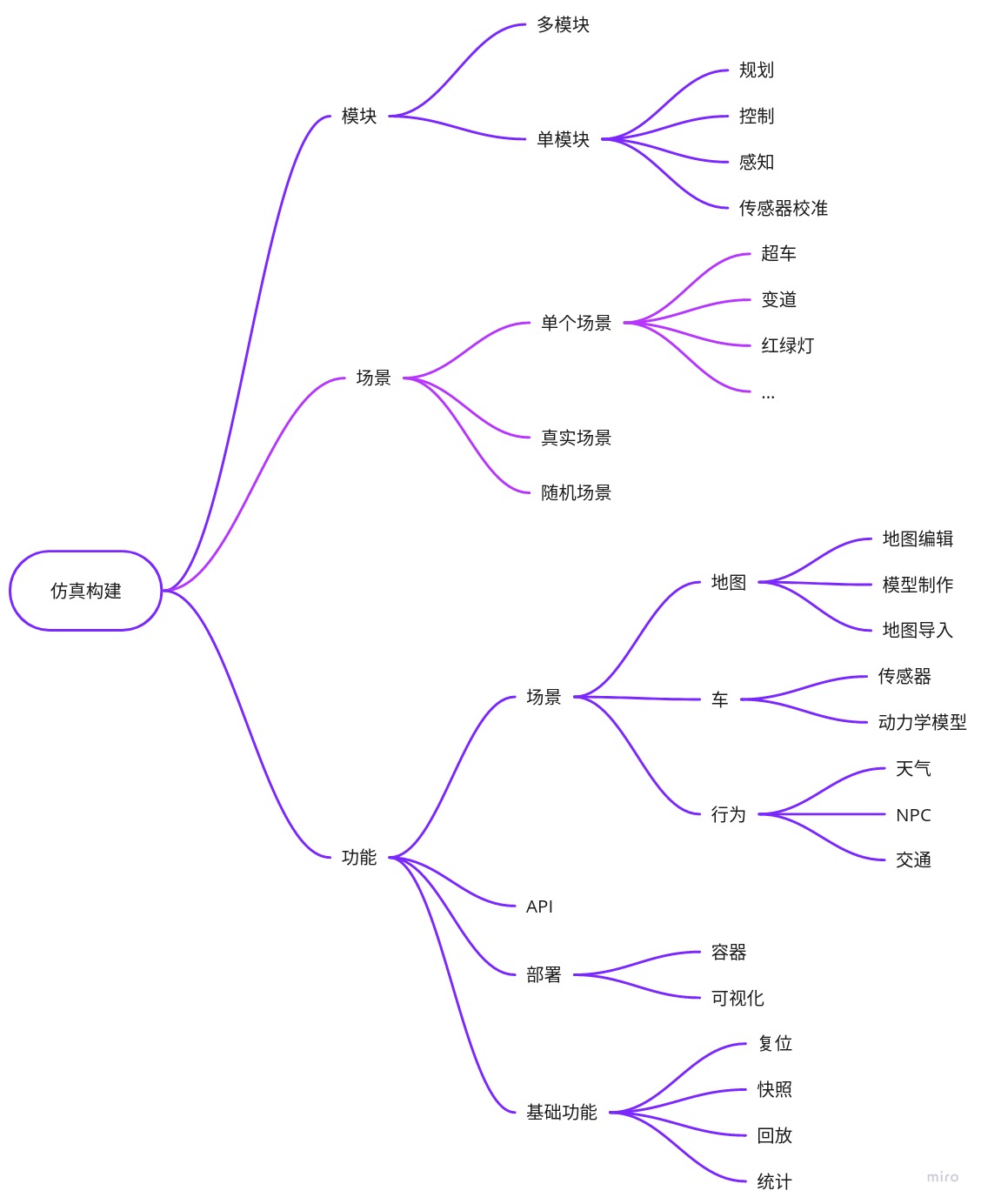
最后根据功能划分,我们可以单独仿真自动驾驶系统的规划控制模块,也可以单独仿真感知模块,可以仿真传感器校准,也可以端到端的仿真所有模块。可以仿真单个受限的场景,也可以仿真整个地图。总之,仿真系统需要提供灵活的场景生成框架,统一的API接口,以及大规模部署的能力。
22.13. 参考
虚幻引擎游戏列表 Unity3D Udacity Carla AirSim lgsvl Apollo EventSystem openscenario