13. Perception
温故而知新,可以为师矣
13.1. Perception模块简介
首先简单看下perception的目录结构:
.
├── BUILD
├── Perception_README_3_5.md
├── README.md
├── base // 基础类
├── camera // 相机相关 --- 子模块流程
├── common // 公共目录
├── data // 相机的内参和外参
├── fusion // 传感器融合
├── inference // 深度学习推理模块
├── lib // 一些基础的库,包括线程、时间等
├── lidar // 激光雷达相关 --- 子模块流程
├── map // 地图
├── model // 深度学习模型
├── onboard // 各个子模块的入口 --- 子模块入口
├── production // 感知模块入口(深度学习模型也存放在这里)--- 通过cyber启动子模块
├── proto // 数据格式,protobuf
├── radar // 毫米波 --- 子模块流程
├── testdata // 上述几个模块的测试数据
└── tool // 离线测试工具
下面介绍几个重要的目录结构:
production目录 - 感知模块的入口在production目录,通过lanuch加载对应的dag,启动感知模块,感知模块包括多个子模块,在onboard目录中定义。
onboard目录 - 定义了多个子模块,分别用来处理不同的传感器信息(Lidar,Radar,Camera)。各个子模块的入口在onboard目录中,每个传感器的流程大概相似,可以分为预处理,物体识别,感兴趣区域过滤以及追踪。
inference目录 - 深度学习推理模块,我们知道深度学习模型训练好了之后需要部署,而推理则是深度学习部署的过程,实际上部署的过程会对模型做加速,主要实现了caffe,TensorRT和paddlepaddle3种模型部署。训练好的深度模型放在”modules\perception\production\data”目录中,然后通过推理模块进行加载部署和在线计算。
camera目录 - 主要实现车道线识别,红绿灯检测,以及障碍物识别和追踪。
radar目录 - 主要实现障碍物识别和追踪(由于毫米波雷达上报的就是障碍物信息,这里主要是对障碍物做追踪)。
lidar目录 - 主要实现障碍物识别和追踪(对点云做分割,分类,识别等)。
fusion目录 - 对上述传感器的感知结果做融合。
整个模块的流程如图:
 可以看到感知模块由production模块开始,由fusion模块结束。
可以看到感知模块由production模块开始,由fusion模块结束。
13.2. production目录
production中主要是存放:
配置和lanuch和dag启动文件
存放训练好的模型
.
├── conf // 配置文件
├── dag // dag启动文件
├── data // 训练好的模型
└── launch // cyber launch加载dag
该文件中有多个lanuch文件,同时一个lanuch文件中包含多个dag文件,也就是说一个lanuch文件会启动多个子模块。
13.3. onboard目录
onboard目录定义了多个子模块,每个子模块对应一个功能,包括:车道线识别,障碍物识别,红绿灯识别,传感器融合,场景分割等。
.
├── common_flags
├── component // 子模块入口
├── inner_component_messages
├── msg_buffer
├── msg_serializer
├── proto
└── transform_wrapper
实际上几个子模块可能合并为一个模块,如何确定模块是否合并呢?我们可以查看”onboard/component”目录中的BUILD文件。
name = "perception_component_inner_lidar",
srcs = [
"fusion_component.cc",
"lidar_output_component.cc",
"radar_detection_component.cc",
"recognition_component.cc",
"segmentation_component.cc",
"detection_component.cc",
],
在BUILD文件中上述几个模块被编译为一个模块”libperception_component_lidar”。也就是说在dag中实际上只需要启动libperception_component_lidar这一个模块就相当于启动了上述几个模块。
看完了perception模块的入口,以及各个子模块的定义,那么各个子模块的功能如何实现的呢? 实际上感知各个子模块的功能是通过lidar,radar和camera3种传感器实现的,每种传感器分别都执行了目标识别和追踪的任务,最后通过fusion对传感器的数据做融合,执行代码分别在”perception/radar”,”perception/lidar”,”perception/camera”目录中。这里有2种查看代码的方式,一种是正序的方式,根据具体的功能,例如从物体识别子模块入手,分别查看lidar,radar和camera模块中的物体识别功能,另一种是倒序的方式,根据传感器划分,先查看传感器分别实现了哪些功能,然后回过头来看各个子模块是如何把上述功能整合起来的。这里我们采用第2种方式,先看各个传感器的执行流程如下图。
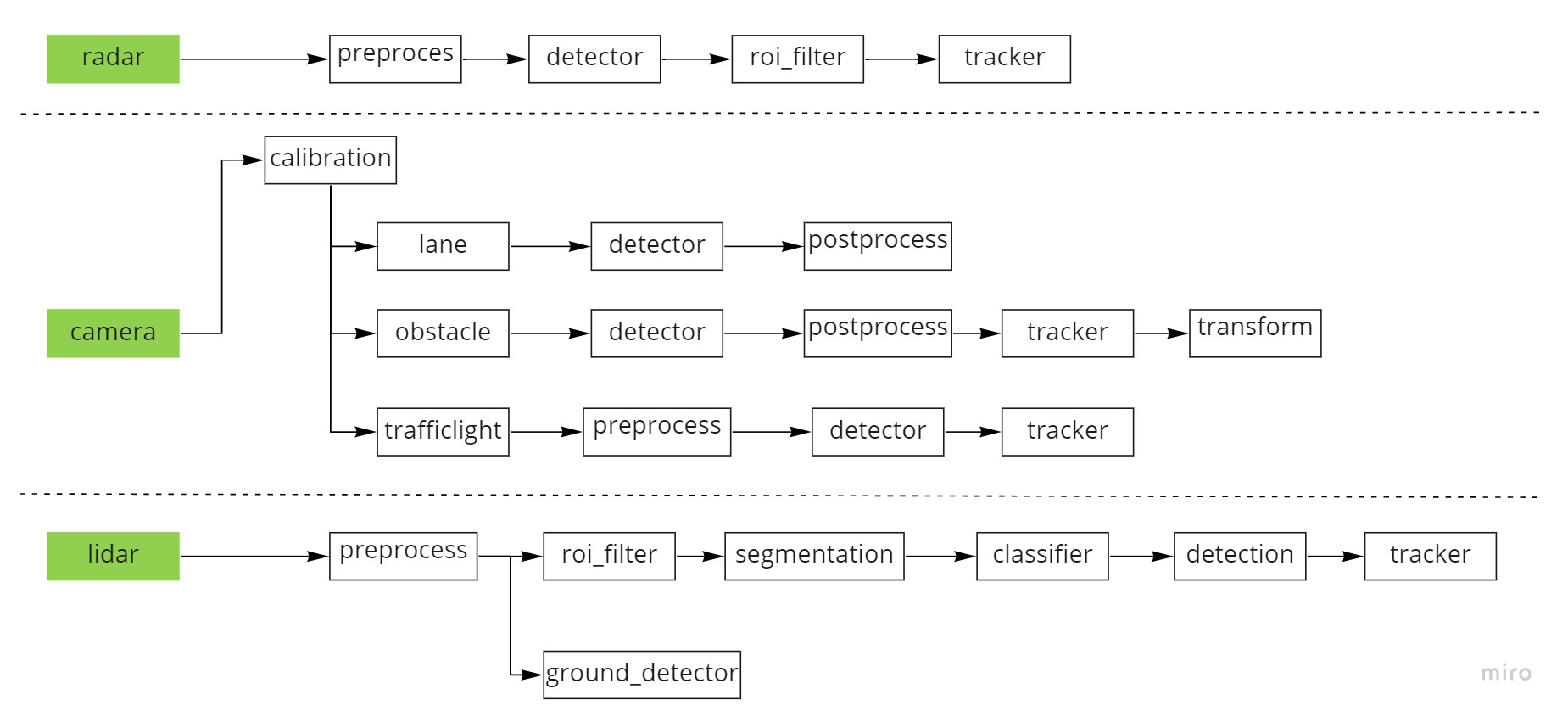 从图中可以看到,每个传感器都实现了物体识别的功能,而摄像头还实现了车道线识别和红绿灯检测的功能,每个传感器执行的任务流水线也大概相似,先进行预处理,然后做识别,最后过滤并且追踪目标。其中物体识别用到了推理引擎inference。
从图中可以看到,每个传感器都实现了物体识别的功能,而摄像头还实现了车道线识别和红绿灯检测的功能,每个传感器执行的任务流水线也大概相似,先进行预处理,然后做识别,最后过滤并且追踪目标。其中物体识别用到了推理引擎inference。
接下来来我们分别查看各个传感器的具体实现。我们先从radar开始看起,主要是radar模块相对比较简单。
13.4. 子模块介绍
radar子模块介绍 camera子模块介绍 lidar子模块介绍 fusion子模块 inference推理子模块